PROJECTS
MS Thesis
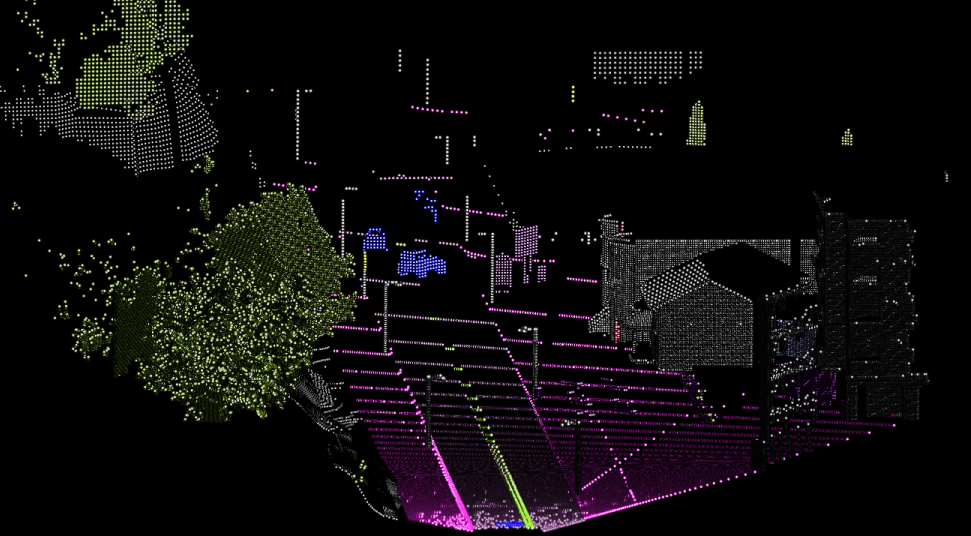
3D Pointwise and Instance Segmentation
We proposed a novel pointwise and Instance segmentation deep learning architecture (Pointer) for the point clouds focused on self-driving application. The model is only dependent on LiDAR data making it light invariant and overcoming the shortcoming of the camera in the perception stack. The pipeline takes advantage of both global and local/edge features of points in points clouds to generate high-level feature. We also propose Pointer-Capsnet which is an extension of CapsNet for small 3D point clouds. Pointer achieved 83.40 % target class accuracy for pointwise segmentation and 82.91 % target class accuracy for instance segmentation on kitti dataset
View Project
Carla: Capstone Project
Udacity SDC ND
Implemented full stack for Udacity Self driving car Carla to navigate in parking lot following the traffic light and lane keeping. The car was able to complete the track in simulation provided by udacity. The three main module were perception, planning and control.
View Project
Joke Generation (OpenAI research request)
WPI
Generating jokes is a challenging and understudied task of Natural Language Processing. A computer that intends and succeeds to generate jokes could be deemed artificially intelligent. We present a couple of novel approaches to joke generation, such as using SeqGAN and a language model. We implement a variety of word-level models to tackle parts of the joke-generation problem, namely text generation and joke classification. Ideally, merging these steps will allow for a model to write joke candidates, that are then pruned by a well-trained classifier. We train these models from a corpus of 231,657 userwritten jokes scraped from reddit.com
View Project
Model Predictive Controller
Udacity SDC ND
The MPC controller drives the vehicle given a reference track around the simulated environment provided bu Udacity Simulator.
View Project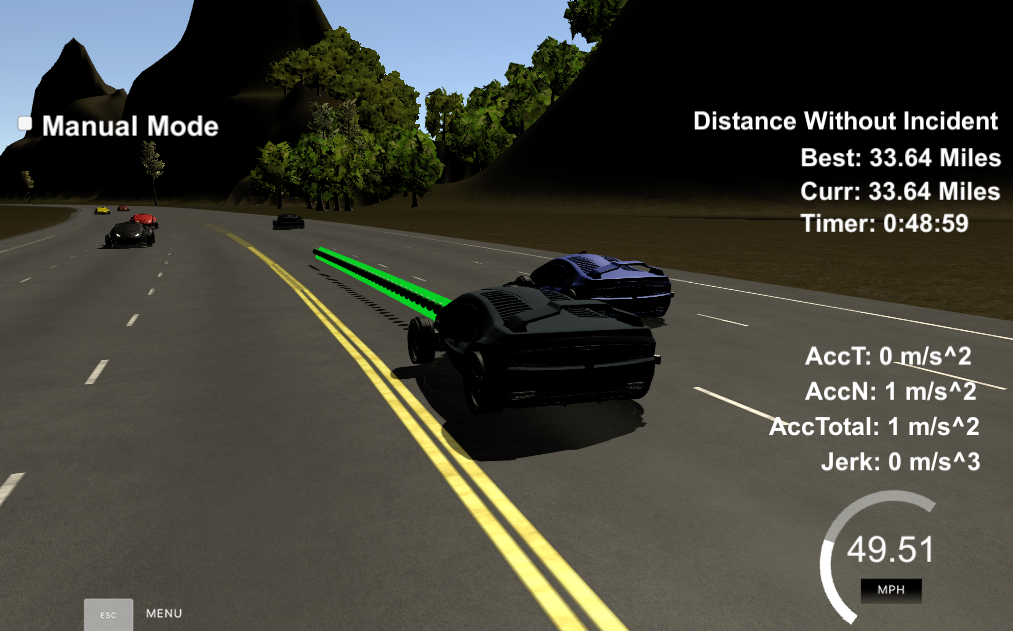
Path Planning
Udacity SDC ND
The car safely navigate around a virtual highway with other traffic that is driving +-10 MPH of the 50 MPH speed limit. Car's localization and sensor fusion data is provided with a sparse map list of waypoints around the highway. The car tries to go as close as possible to the 50 MPH speed limit and passing slower traffic when possibl
View Project
Extended Kalman Filter
Udacity SDC ND
I utilized a kalman filter to estimate the state of a moving object of interest (bicycle that travels around the vehicle) with noisy lidar and radar measurements.
View Project
Advance Finding Lane Lines for Autonomous Vehicles
Udacity SDC ND
Built a pipeline using conventional CV to detect lanes and calculate radius of curvature for curved road scenarios for autonomous vehicles. Used Perspective Transform, HLS colorspace for thresholding and Sobel absolute gradients to detect white and yellow lane lines which were fitted in a 2-degree order polynomial which was used to calculate the radius of curvature of the road. The algorithm performed well when tested on KITTI benchmark dataset.
View Project
Double DQN based Autonomous Obstacle Avoidance for Quadcopter Navigation
WPI
One of the challenges faced by Autonomous Aerial Vehicles is reliable navigation through urban environments. Factors like reduction in precision of Global Positioning System (GPS), narrow spaces and dynamically moving obstacles make the path planning of an aerial robot a complicated task. One of the skills required for the agent to effectively navigate through such an environment is to develop an ability to avoid collisions using information from onboard depth sensors. In this paper, we propose Reinforcement Learning of a virtual quadcopter robot agent equipped with a Depth Camera to navigate through a simulated urban environment.
View Project
Distributed Framework for A3C TORCS
WPI
The performance of a reinforcement learning agent depends on its exploration by interacting with the environment. A popular approach to increase the exploration is to implement Asynchronous advantage actor critic algorithm, but it requires a multi-core high-performance CPU which can multi-thread environment processes. We propose a simple scalable distributed framework to implement the Asynchronous advantage actorcritic reinforcement algorithm on multiple single or dual core systems. This framework was experimented on the open source car racing simulator-TORCS. Based on the results obtained, we conclude that a distributed approach with a high number of agents gives more exploration to the agent and reduces the training time than a single agent running on a single system.
View Project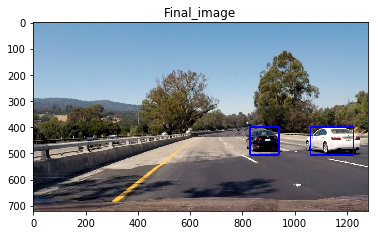
Vehicle Detection
Udacity SDC ND
The objective of the project was to detect vehicles driving on adjacent lanes for autonomous vehicles to make smarter decisions about changing lanes.Performed a Histogram of Oriented Gradients (HOG), binned color features, as well as histograms of color for feature extraction on a labeled training set of images and trained a classifier Linear SVM and Random Forest classifier for detecting vehicles. The pipeline performed well when tested on KITTI benchmark dataset.
View Project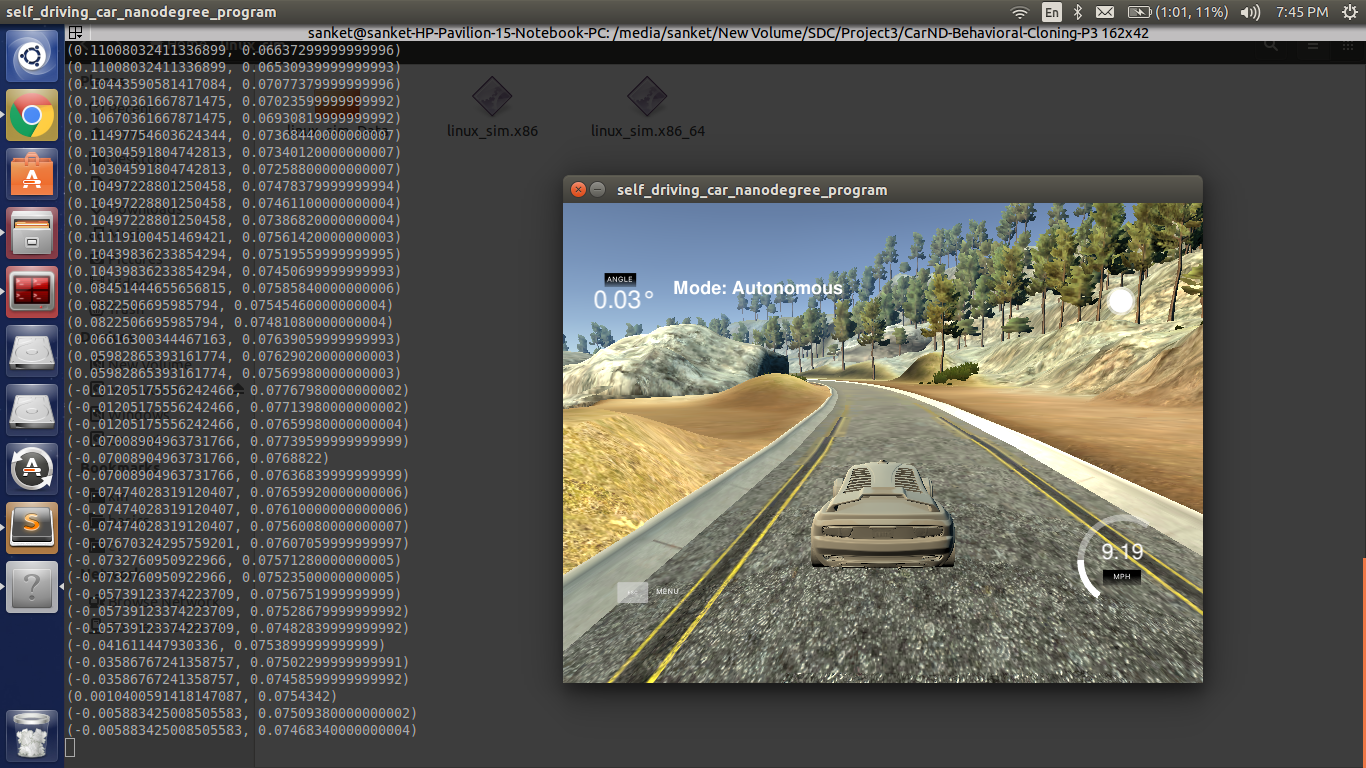
Behavioral Cloning
Udacity SDC ND
The objective of the project was to train autonomous vehicles using data of good driving behavior. The Udacity open source self-driving car simulator was used which can record 3 images from a same state and steering angle. Built a CNN in Keras that predicts steering angles for autonomous vehicles from image feed from the environment state.
View Project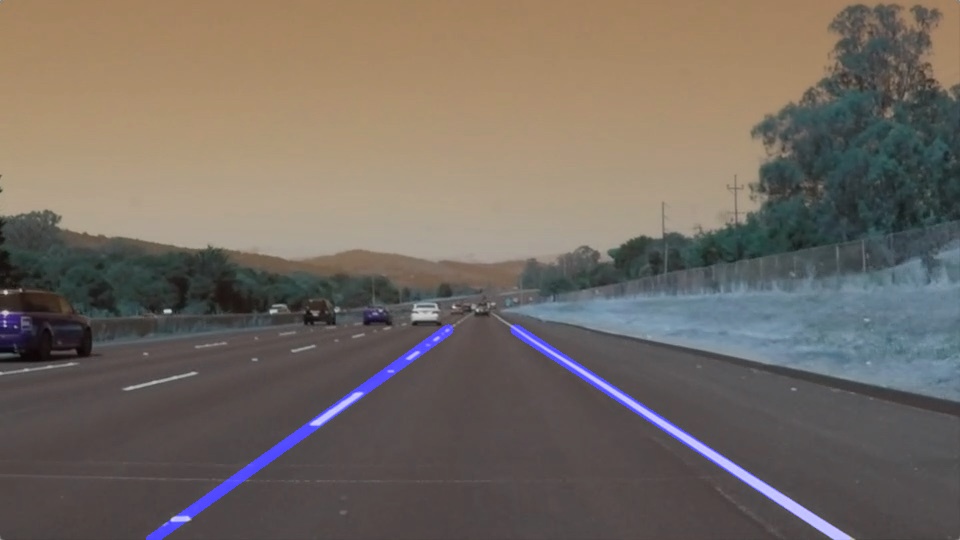
Finding Lane Lines on the Road
Udacity SDC ND
When we drive, we use our eyes to decide where to go. The lines on the road that show us where the lanes are act as our constant reference for where to steer the vehicle. Naturally, one of the first things we would like to do in developing a self-driving car is to automatically detect lane lines.
View Project
Vehicle classification and Localization in aerial image
Winner of Smart India Hackathon 2017 Defense Production. The algorithms classify and localize vehicles in aerial images
View Project
Traffic Signs Classifier
Udacity SDC ND
Classification of Traffic Signs using CNN. A very basic application of CNN for classifying traffic signs, important feature for SDC to follow traffic rule and update speed limits.
View Project